Eric Wang
August 5, 2021
AndrewNG-CV基础
AndrewNG-CV 基础
1 The Basics of Convolutional Neural Networks
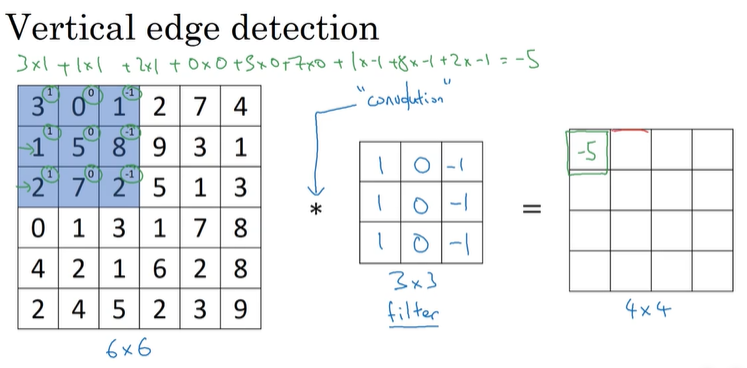
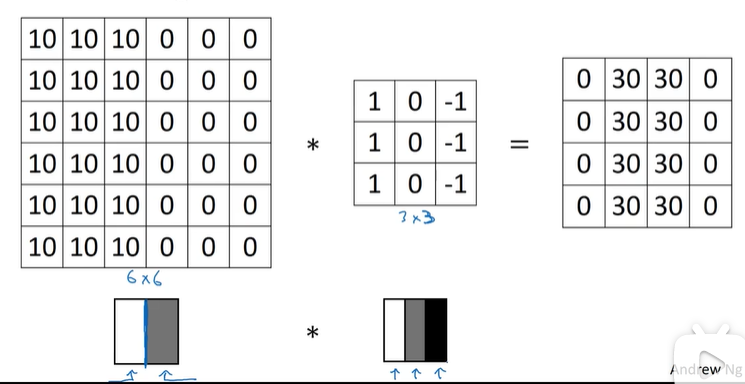
1.1 Edge detection
Use filter to do the convolution operation
One Example
Convolution function in tensorflow: tf.nn.conv2d
Other Examples

- 1->-1: light->dark
- -1->1: dark->light
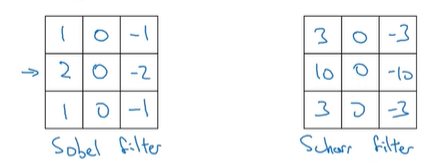
Furthermore, treat the 9 numbers as parameters, and use backward propagation to improve them.
1.2 Padding(填充)
To preserve the information on the edges and corners.
- Valid convolutions:
- No padding
- $n\times n$ * $f\times f$ ——> $(n-f+1)\times(n-f+1)$
- Same convolutions:
- Pad so that output size is the same as the input size.
- $n+2p-f+1=n$ ==> $p=\frac{f-1}{2}$
- f 通常是奇数
1.3 Strided Convolutions
- with $n\times n$ image, $f\times f$ filter, padding p, stride s, the ouput size is:
$$ \bigg\lfloor\frac{n+2p-f}{s}+1\bigg\rfloor\times\bigg\lfloor\frac{n+2p-f}{s}+1\bigg\rfloor $$
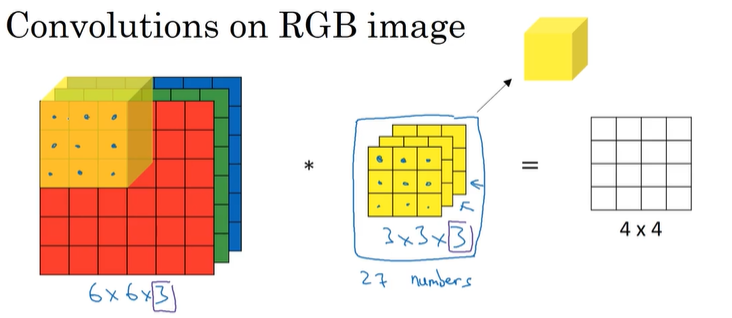
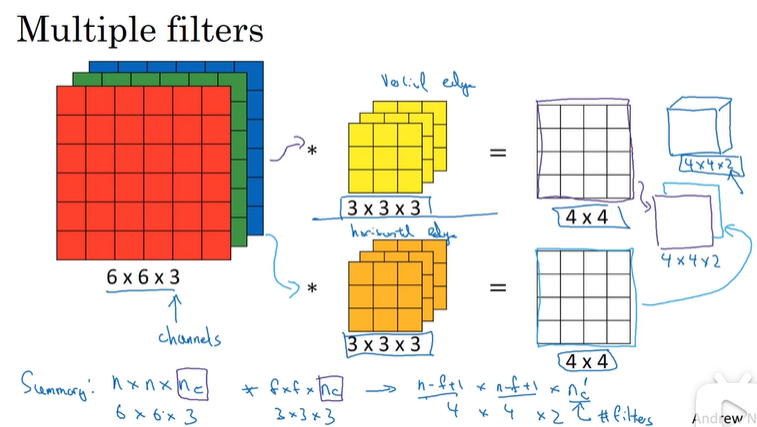
1.4 Convolutions over volumes
channels(depths, 第三个维度)相等
multiple filters:
1.5 One Layer of a CNN
If layer l is a convolution layer:
- $f^{[l]}=$filter size
- $p^{[l]}=$padding
- $s^{[l]}=$stride
- $n_C^{[l]}=$number of filters
- Each filter is: $f^{[l]}\times f^{[l]}\times n_C^{[l-1]}$
- Weights: $f^{[l]}\times f^{[l]}\times n_C^{[l-1]}\times n_C^{[l]}$
- bias: $n_C{[l]}$ — (1,1,1,$n_C{[l]}$)
- Input: $n^{[l-1]}_H\times n^{[l-1]}_W\times n^{[l-1]}_C$
- Output: $a^{[l]}=n^{[l]}_H\times n^{[l]}_W\times n^{[l]}_C$
$$ n^{[l]}=\bigg\lfloor\frac{n^{[l-1]}+2p^{[l]}-f^{[l]}}{s^{[l]}}+1\bigg\rfloor $$
1.6 Example ConvNet
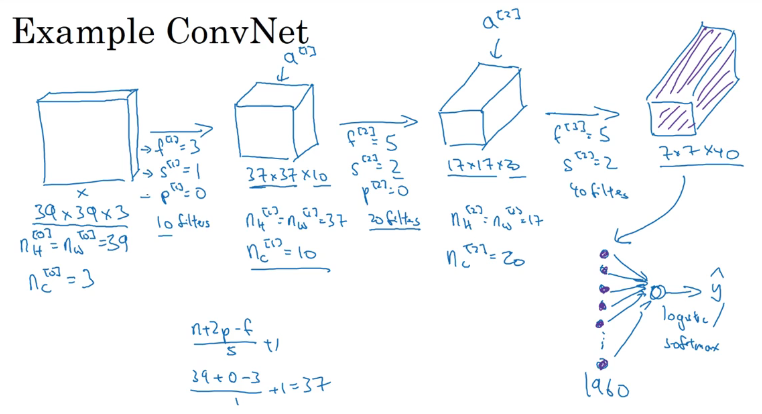
Height and Width stay the same for a while, and gradually trend down as you go deeper in the neural network.
The number of channels gradually increase.
Types of layer in a convolutional network:
- Convolution (CONV)
- Pooling (POOL)
- Fully connected (FC)
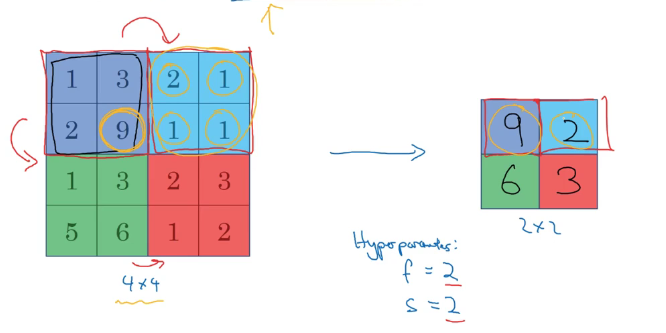
1.7 Pooling layers
- Max pooling
only has hyperparameters(fixed), doesn’t has parameters.
 $$
n^{[l]}=\bigg\lfloor\frac{n^{[l-1]}+2p^{[l]}-f^{[l]}}{s^{[l]}}+1\bigg\rfloor
$$
$$
n^{[l]}=\bigg\lfloor\frac{n^{[l-1]}+2p^{[l]}-f^{[l]}}{s^{[l]}}+1\bigg\rfloor
$$
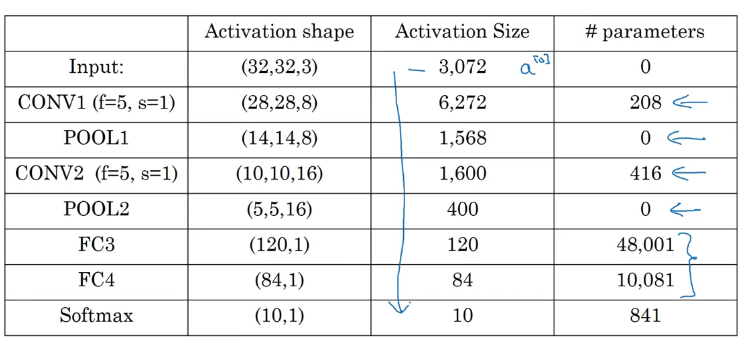
1.8 Neural network example
2 Deep Convolutional Models: Case Study
2.1 Classic Networks
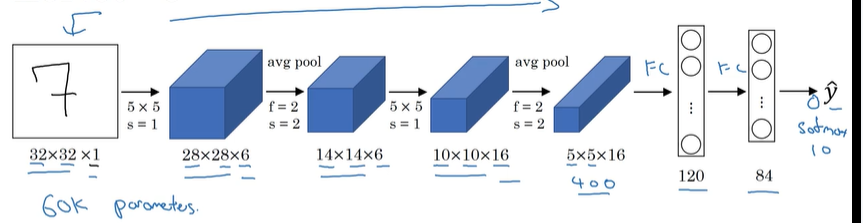
LeNet-5
- trained on grayscale images(灰度图片)
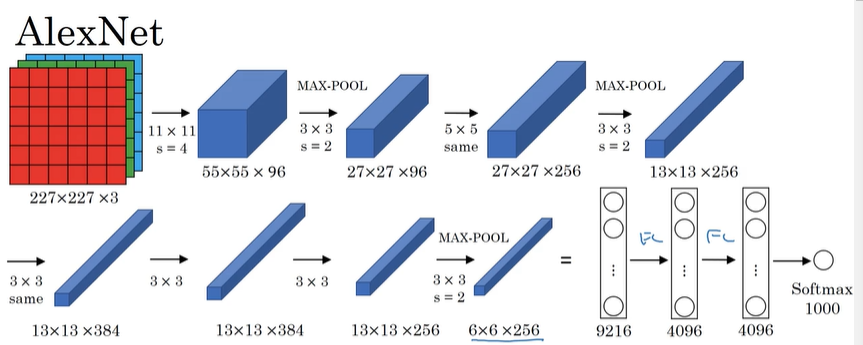
AlexNet
- Similar to LeNet, but much bigger.
- $\approx60M$ parameters.
- Use ReLU
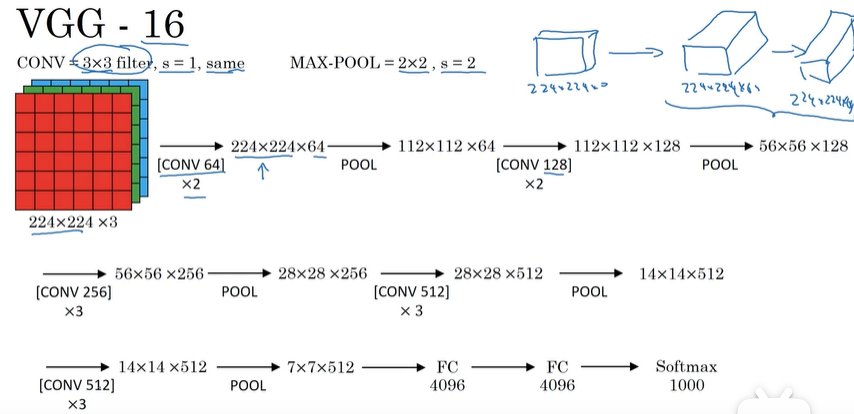
VGG-16
- 共16个layer
- CONV层的卷积核和POOLING层的格式都是固定的
- $\approx138M$ parameters.
- 核VGG-19的表现不相上下
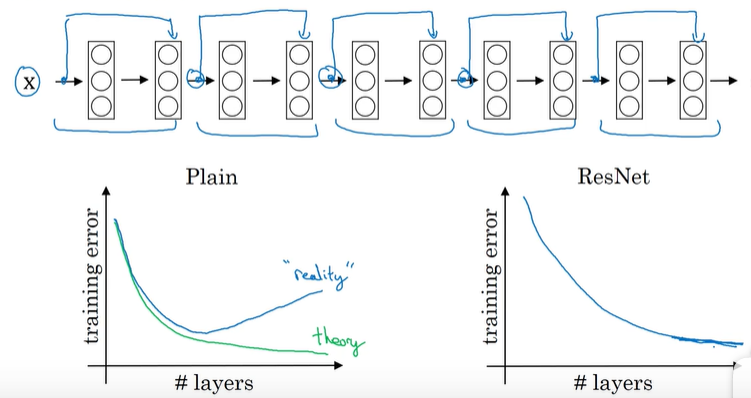
3 Residual Networks (ResNets 残差网络)
Residual block
- Add “short cut” (skip connection)